The industrial robot is connected with the automatic feeding device and the logistics line to form an automatic assembly unit to complete the assembly operation on the automatic logistics production line.
The small multi-joint industrial robot is in the form of CNC five-axis joint coordinates. The motion joint axis is driven by an AC servo motor with an encoder, and an open CNC system with semi-closed loop position feedback.
The AC servo motor directly drives the cycloid reducer, harmonic reducer and other mechanisms to minimize the transmission error; the main support slewing guide of each joint adopts high-precision, high-rigidity crossed roller bearings to ensure the flexibility of joint movement and industrial robots.
High-precision repeat positioning; different finger attachment devices can be configured to meet the assembly process requirements of automated logistics production lines, and are suitable for automated production lines in the automobile, motorcycle, construction machinery and household appliance industries.
Features of the small articulated robot:
The transmission stability and repetitive positioning accuracy of each joint of the industrial robot are the main indicators of the performance of the industrial robot. In the design of the body structure of the small multi-joint assembly industrial robot, the traditional mechanical design concept is broken, and the cycloid reducer with large reduction ratio and high precision is adopted.
The servo motor is directly connected with the cycloid reducer to drive the motion of the industrial robot, improving the original transmission chain length of the industrial robot, the complex transmission structure and the large transmission error. The position error and backlash are compensated by the numerical control system to ensure that the position repeatability of the industrial robot is not greater than ±0.05mm.
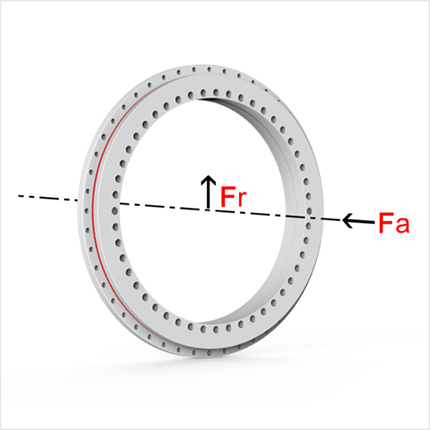
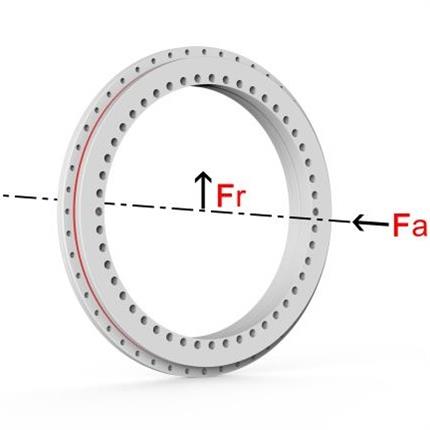
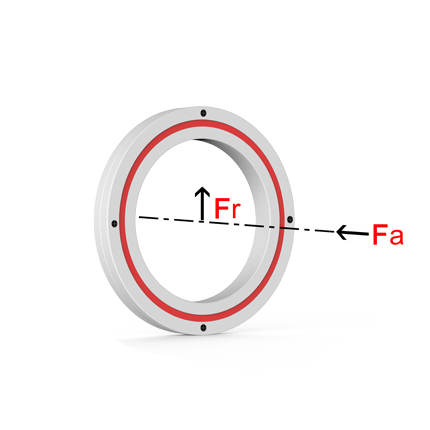
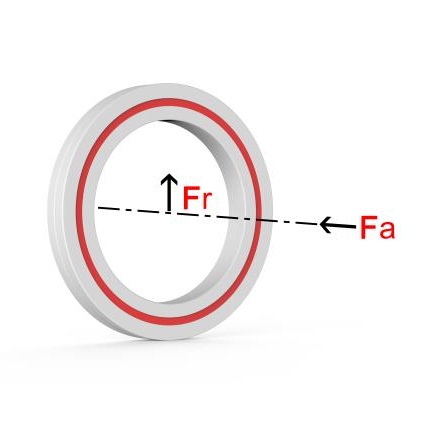
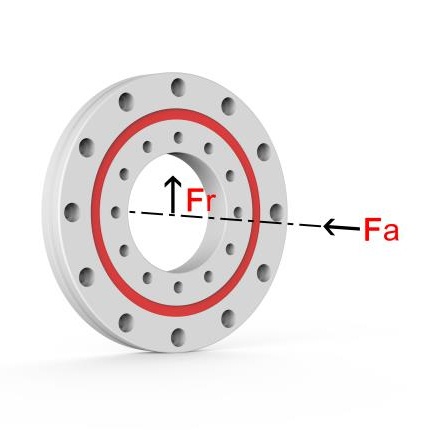
The small multi-joint industrial robot adopts high-precision crossed roller bearings. Because the cylindrical rollers in the bearing are arranged perpendicular to each other on the rolling surface of the V-shaped groove at 90°, the bearing can bear the radial load, axial load and overturning. All aspects of load such as moment.
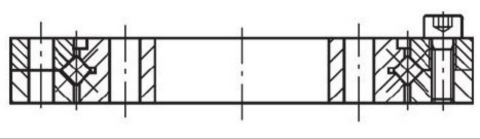
The size of the inner ring and outer ring of the crossed roller bearing is minimized to the maximum extent. The outer ring adopts a two-part split structure, and the preload of the bearing can be adjusted. By applying a preload, high rigidity and high precision are obtained. Axial runout accuracy is not greater than ±0.01mm.
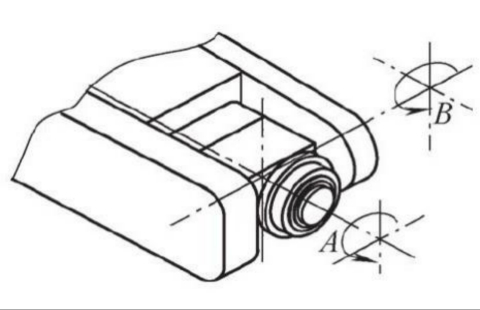
The application of the crossed roller bearing in the joint rotation part of the industrial robot can reduce the installation space of the joint support of the industrial robot, simplify the support structure, and improve the transmission rigidity and the geometric accuracy of the industrial robot.
In order to expand the versatility of the developed industrial robot itself and adapt to the requirements of different automated production lines, the AC servo motor, cycloid reducer and crossed roller bearing are integrated and designed in modules. Combined with the pertinence and single accuracy of the logistics automatic line, it can achieve the purpose of flexibility and adjustment, high efficiency and high precision.

According to the different functional requirements of industrial robots, different loads and precision requirements are combined into modules, and the modules have a unified and standardized interface to shorten the design and manufacturing cycle and reduce manufacturing costs.
The industrial robot control system reserves various I/O interfaces to connect with external equipment, such as: I/O Precess plug-in type, I/O Modulea slot type, I/O Moduleb integral type, I/O LinkAdupter, etc. , In order to connect the automatic line of the logistics system, it can adapt to the reconfiguration of industrial robots and meet the flexibility requirements of automated production lines.

A Heavy-duty glass grinder user in Thailand chose Efant’s RB series cross roller bearings for their glass grinder.
Submit Request